Dejan pt, meni se to isto dogada, mislim da nije nikakva pogreska u kodu, jednostavno je staza preuska i robot izade sa staze. Jedino rijesenje je mozda kada skrece lijevo ili desno mu dati naredbu wait()sec da se stigne okrenuti. kondrasek, razumijem i ja sto moram napraviti u teoriji, ali sve sto sam do sada pokusao nije funkcioniralo.
2. kolo CM lige
Sinisa.jovcic
#25
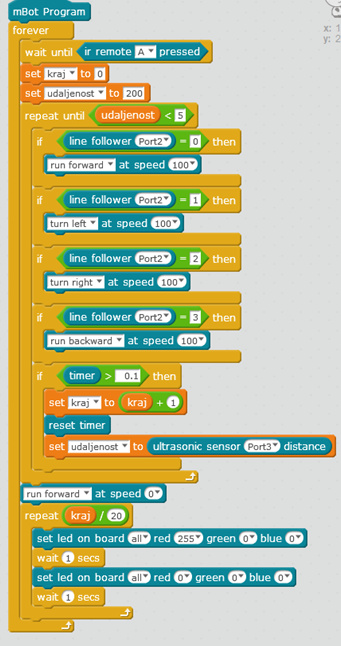
Ekipa, robot će stati na kraju ako stavite kutiju na kraj a podesite senzore da stane na ispod 5cm ispred prepreke. Sa trajanjem se zadatak rješava tako da novu varijablu nazovemo npr. ukupnjak=ukupnjak+timer (kojeg sam nariktao za potrebe ultrazvučnih senzora na 0.1)
Na kraju ide repeat ukupnjak/20 te tamo se poriktaju lampice koje gore pa se gase… meni funkcionira savršeno (osim brzine mbota)
Dejan_PT
#26
Da je kutija na kraju onda je to druga prica, zacas je robot na kraju i stoji ko vojnik, klinci su apsolvirali taj zadatak, ali kutije nema u zadatku pa je upitno hoce li se to priznavati… Ovako robot niti ne dodje do kraja staze, a vec stane jer ce prije ili poslije na nekom zavoju oba senzora izaci sa staze i robot ce stati.
kondrasek
#28
Kad je brzina veća od 100 naš isto stane. Svaka brzina veća od 100 nas baca vam sa staze i stane.

jasenka.kuljak
#30
Podržavam prijedlog, djeca se pripremaju za druga natjecanja i teško ih je okupiti
SanjaK
#32
Kola CM lige treba promatrati kao motivirajući element… važnije od rezultata je da učenici usvajaju vještine i znanja iz računalnog razmišljanja, građe i načina rada robota, programiranja, algoritama, naredbi…
žao mi je da pojedini mentori ne vide važnost rada sa što više učenika u području robotike… već se orijentiraju na rezultate…
Važan je proces učenja svakog učenika, njegova individualna postignuća!
SanjaK
#33
Smisao je u našoj vlastitoj odgovornosti i metodičkom pristupu radu s učenicima.
Mišljenja sam da je u redu da ja znam rješenje, da sam osobno isprobala zadatak, predvidjela poteškoće koje će moji učenici imati, izradila rješenje…
Imam izbor… hoću li gotovo rješenje dati svojm učenicima… ili ću ih staviti u problemsku situaciju, pratiti kako napreduju, uočiti ključni trenutak i plasirati “pomoćnu natuknicu”, dozvoliti im da na svoj način pristupe postupku rješavanja…
Mene su moji učenici iznenadili… koliko su različitih pristupa imali da riješe zadatak 2.kola… koliko su međusobno raspravljali, predlagali, snalazili se… užitak mi je bio gledati ih kako se nadopunjuju
SanjaK
#35
Uložiti malo vremena u svoje učenje!!! Edukacijskih materijala ne nedostaje… Uložiti svoja znanja, vještine i zalaganja - vjeruj mi isplatit će se
al ak ti je lakše gledat u zid i gunđat… onda OK… to je tvoj izbor
Drago
#38
A što ćeš ako opet obrišeš sve svoje poruke? Suzdrži se od gluposti. Budi konstruktivan i smanji sarkazam.
Eh, prekasno, vidim da si opet brišeš postove. Sada možeš nastaviti gledati u zid. Raspravu prepusti pametnim ljudima.
Drago
#39
Sve štima. Ali poanta ovog posta je da nam se omogući produženje održavanja 2. kola zbog svih gore navedenih razloga. Ja nemam 2 sata tjedno, a robotiku za rješavanje 2. kola još nisam imao jer do tada IRIM nije poslao zadatak, što znači da u jednom satu moramo odraditi sve do uploada na vimeo.
SanjaK
#40
Slažem se za produljenje roka 2.kola, zato sam i stavila “lajk” na prvu objavu u temi koju je otvorio kolega bradica
Stuba
#46
Postoji razlog zašto su programeri tako cijenjeni i sada si vidio zašto. Zadatak je možda teži onima koji to razumiju slabije od ostalih. U zadatku je napisano da robotu NE TREBA svijetliti ledica na početku ili na kraju (za to se dobivaju dodatni bodovi), a ti ako nemaš rješenje isprogramiraj robota samo da prati liniju i stane na kraju. Dobit ćeš onoliko bodova koliko ima staza.