Pozdrav,
Da li imate sličnih problematičnih iskustava na mBotovima kao i mi od nedavno?
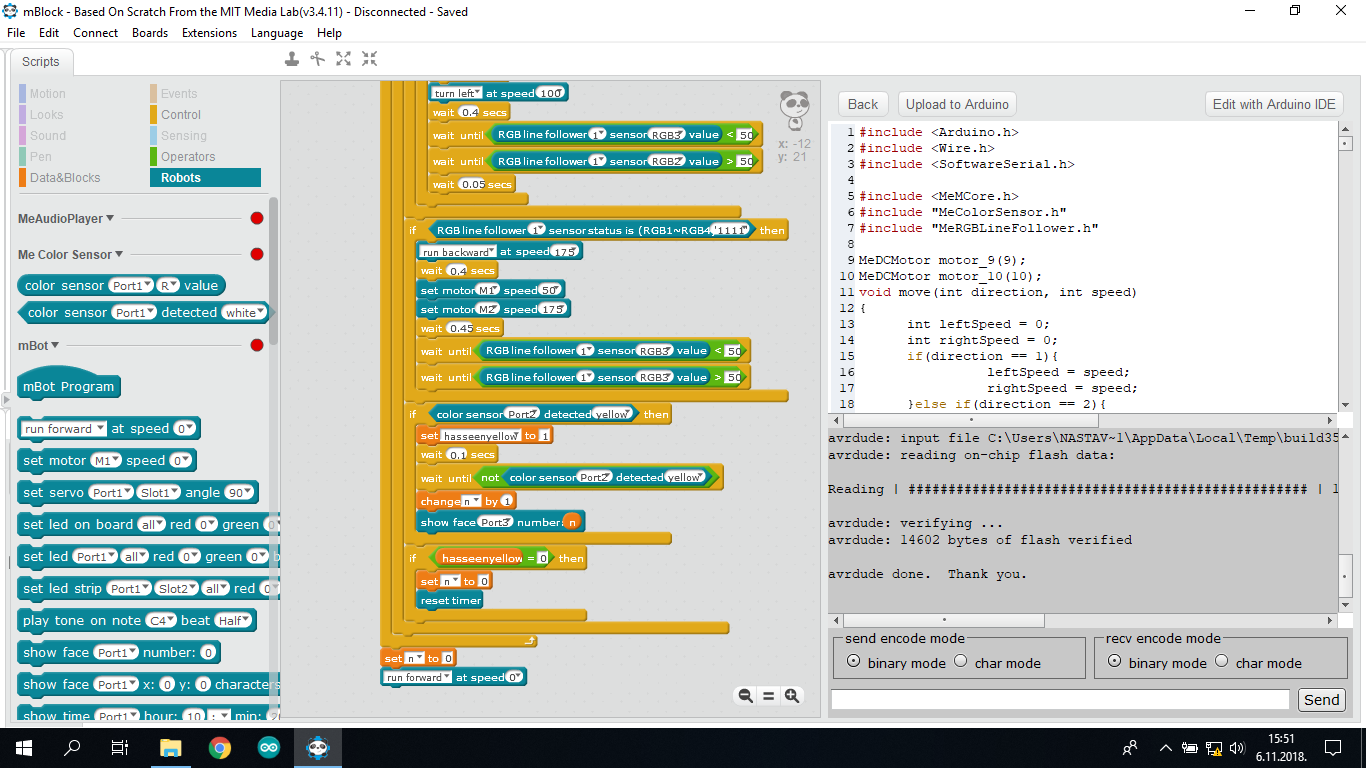
Naime, nakon što 3 godine radimo s mBotovima, nedavno su nam se isti počeli čudno ponašati. Znači, program ne mijenjamo nego isti program ponavljamo nakon gašenja/paljenja ili resetiranja robota, a robot ili samo ode ravno, ili ne uhvati crtu, ili usred programa napravi nešto totalno drugačije. Prvo sam mislio da su djeca nešto zeznula u logici, ali onda mi je došlo barem 5-6 učenika sa istim problemima dok smo radili 1. kolo CM lige.
Na makeX-u ista situacija. Npr. imamo program 1 i 2 sa pritiskom na gumb jednom ili dvaput. Nakon brzog gašenja/paljenja ili reseta, čini mi se da se mcore pločica malo zblesira i prvi program odradi na cca 1 sec. Nakon drugog pritiska, prvi program krene ispočetka. Nako što ga pustimo ugašenog 10-ak sekundi, mBot radi bolje. Provjerio sam na 2 mcore pločice i isto se ponašaju. Mislim da smo u 9. mjesecu stavili novi firmware i praktički nismo radili s mBotovima do 15.10. tako da nisam to prije niti skužio.
Ugasiš mBota, pustiš 10 sec, programi rade savršeno.
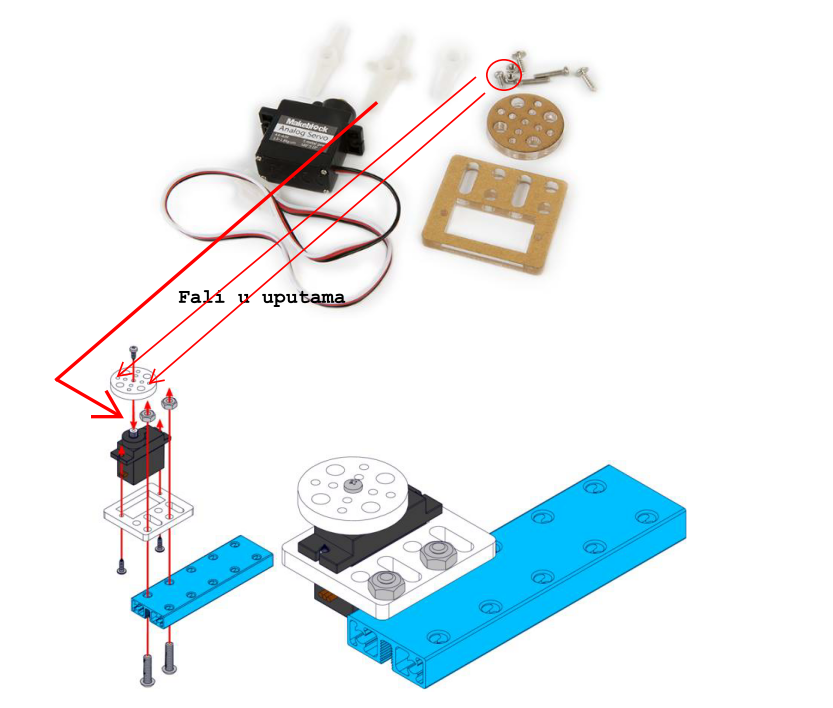
 Dijelovi robota se mogu mijenjati, kao i na WERu.
Dijelovi robota se mogu mijenjati, kao i na WERu.