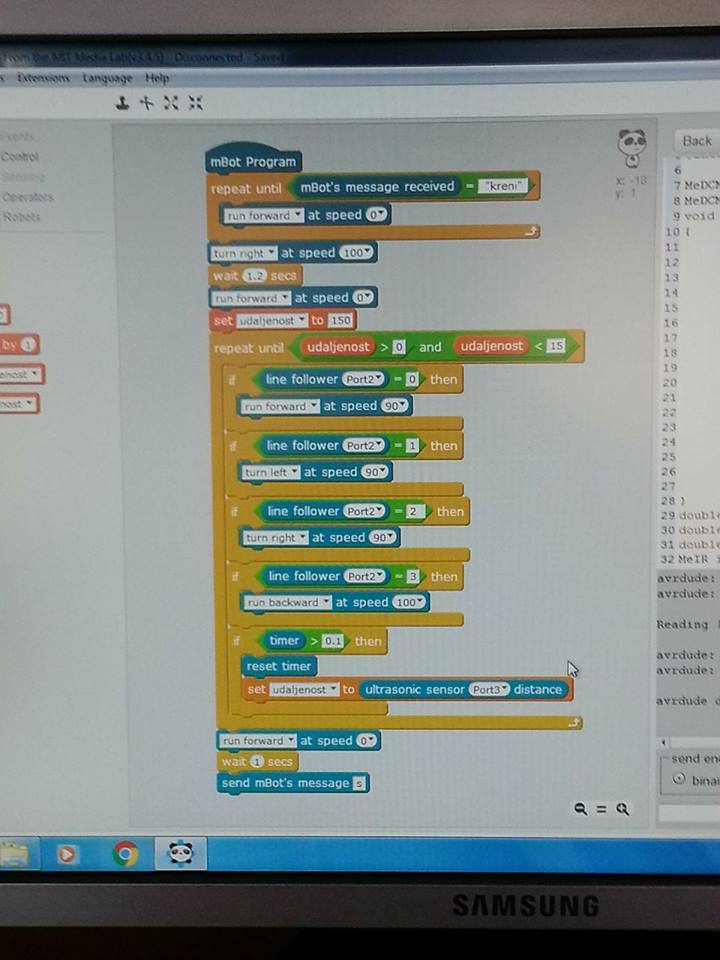
Napravite kao što je rješavano u drugom kolu prošle školske godine, dodajte varijablu udaljenost, postavite je na početku npr na 200 i onda provjeravajte ultrazvučnim senzorom da li je udaljenost npr veća od 4 cm i manja od udaljenosti koju želite.
3 kolo - pripreme i provedba
Dejan_PT
#64
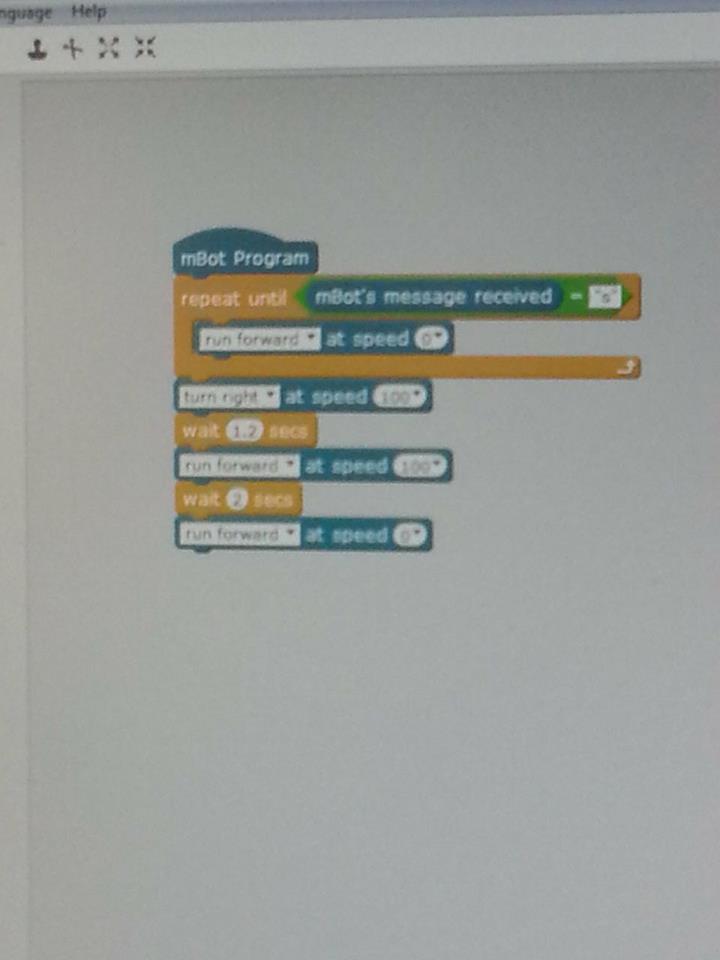
Problem je u tome sto program stane odmah nakon okretanja za 180, ne krece pratiti liniju nego stane. Ako ga pokrenem bez okretanja onda sve radi normalno i bez greske, ali kad se doda okretanje, izvrsi se samo ono.
maja
#65
Pozdrav,
Ima li netko ideju zbog čega u jednoj vožnji drugi robot uspije poslati poruku trećem, a u sljedećoj vožnji se ništa ne događa? Program isti, a jednostavno 2. robot stane i 3.robot ne krece s mjesta.
VladoLendvaj
#66
Probajte staviti nove baterije. Također, za svaki slučaj ugasite i upalite robota između 2 pokretanja.
VladoLendvaj
#67
Vjerojatno nešto detektira kao prepreku tijekom okretanja, pripazite da je sve dovoljno udaljeno, eventualno dodajte timer da ne gleda prepreke baš u svakom ciklusu.
Brajki
#68
Evo kako sam smo moji učenici i ja pristupili ovom problemu. kada robot primi poruku prvo počne skretati u desno 0.3s (taman toliko da se oba senzora line followera maknu sa crne linije) potom smo stavili da tako skreće dok line follower ne dobije na oba senzora signal da je iznad crne linije (tako smo se osigurali da će uhvatiti liniju), kad se to dogodi automatski prelazi u idući dio a to je slijeđenje linije.
Nadam se da Vam je ovo pomoglo.

Leonb
#70
Pozdrav, imam pitanje za 3. robota treba li on skrenuti točno 180 stupnjeva ili da stavimo turn right i sekundi koliko nam treba i koliko traje svaki morseov znak u milisekundama
VladoLendvaj
#71
Ne treba točno 180 stupnjeva, bitno je da stane unutar zadnjeg polja, možete pogledati u grupi na vimeu kako su riješili oni koji su već snimili rješenje.
Dejan_PT
#74
Hvala na svoj pomoci! Problem je rjesen i to na vrlo jednostavan nacin uz malu promjenu uvjeta, bez timera i postavljanja varijabli.  Isprobao sam barem 10 varijacija programa i ova se jedina pokazala uspjesnom za mojeg robota.
Isprobao sam barem 10 varijacija programa i ova se jedina pokazala uspjesnom za mojeg robota.
ikunovic
#79
Pozdrav svima,
za one koji imaju problema s primanjem poruka, da nekad primi, a nekad ne, predlažem da na kraju vožnje određenog robota naredbu SEND MESSAGE stavite u petlju PONAVLJAJ ZAUVIJEK umjesto da je samo jednom izvršite kako biste maksimalno povećali šanse da će drugi robot primiti barem jednu od svih poslanih poruka.
Može se dogoditi neka smetnja i da jedna poruka koja je poslana bude izgubljena, (kao kada vam zvoni telefon doma, a vi niste čuli prvo zvono. ali onaj koji zove još će malo pričekati dok se ne javite, a vama će telefon još jednom zazvoniti. Tako se povećavaju šanse da ćete čuti zvono)
Nadam se da sam nekima skratio muke, ja sam se pol sata nakon radionice igrao s time, mislili smo da su baterije slabe (što također smanjuje šansu primanja samo jedne poruke), pa da prvi robot koji stalno šalje poruke ometa signal i slično. Ali ovako je uvijek radilo.
Sretno svima!
P.S. Pohvala organizatorima na smišljanju zadatka, predivan je! 
Pozdrav,
DarjanB
#80
Nakon nekoliko sati razno raznih isprobavanja, ova tvoja poruka nas je jaaaaaako razveselila.
Hvala ti puno!
ipiria
#81
Poštovane kolege,nakon što su učenici napisali programe i učitali u robote i sve je ok bilo,izvršili su zadatke,roboti su se odjedanput počeli čudno ponašati i ne prihvaćati naredbe.Od riješenog zadatka ovog kola vratili smo se na početak.Pokušali smo različite robote sa različitim programima,zatim na drugim računalima te smo resetirali robote, ali nisu htjeli uopće prihvatiti napisane programe iako su ujutro radili, a pred kraj dana stalo sve.Više iskreno nezz što napraviti i pokušati pa ako netko ima ideju ili mu se desilo isto da javi problem i riješenje.Unaprijed hvala.
Dejan_PT
#82
Baterije znaju biti krivac takvim stvarima. Ako su one jeftinije baterije, malo vise isprobavanja, a ovaj zadatak ima jako puno isprobavanja, isprazni bateriju toliko da jednostavno nema dosta energije da bi svi senzori i motori radili kako treba.