Ovdje možete postavljati pitanja u vezi zadatka za 4. kolo CML
4. kolo tema za pomoć
VladoLendvaj
#2
Nekoliko savjeta:
pogledajte edukacijske video sadržaje na:
http://izradi.croatianmakers.hr/robotika/
pogotovo Ultrazvučni senzori i Ultrazvučni senzori 2
Pratite crtu sa strane, a ne po sredini
Kod provjere udaljenosti do prepreke, postavite i donju granicu, npr 3 cm.
Kod zaobilaženja prve prepreke možete se koristiti direktno naredbama za kretanje robota bez senzora.
Ako što zapne, pitajte.
VladoLendvaj
#5
Mislim na to da će vam se robot ponašati stabilnije ako stavite da ide ravno kad je očitanje senzora 2, mada bi vam sve trebalo raditi i sa standardnim kad ide ravno kod očitanja 0.
jerkol
#6
Postoji veci problem,kad prati crtu nije u funkciji ultrazvucni senzor i obrnuto.Senzori se preklapaju,kako ih odvojiti?
VladoLendvaj
#7
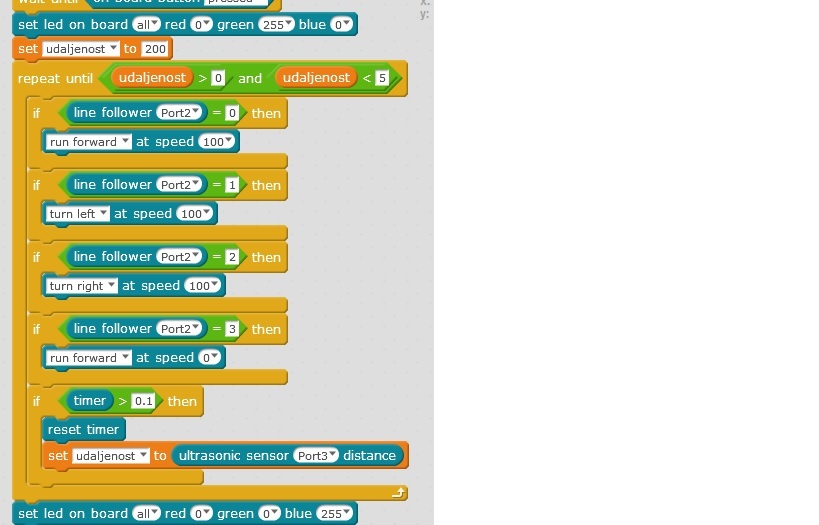
U funkciji je sve, samo staviti repeat untill udaljenost veca od 3 i manja od 10, ili vec koji brojevi vam gdje trebaju i unutar toga pratite crtu i ocitavajte udaljenost, ima dosta koda za to po forumu, baš i ovih dana.
jerkol
#8
Tri dana pokusavamo rijesit problem i nista.
Nema smisla gubit vrijeme. Mozda treba uvest nove varijable.Ovo nije za nas uzrast.
Ovo nek’ mentori programeri rade.
Nova prilika je 5. kolo.Do tada odmaramo!

Amalija
#11
Nemam nikakvu ideju kako da mBot prvu prepreku zaobiđe, a pred drugom stane. Možda trebam žešće razmišljati? Mislila sam da će djeca, ali - ćorak. Btw, mBoti nam ponekad (često) imaju neku svoju volju, neobjašnjivo se ponašaju, možda razina punjenja baterija igra veliku ulogu… možda su senzori pomolali… Help!
LidijaB
#12
napravi privremenu varijablu, daj joj vrednost 0 na početku, kada naidješ na prvu prepreku koristi and i ispitaj da li je daljina manja od i promenljiva na 0, u petlji promeni promenljivu na 1 i više se ta petlja neće izvršavati.
drugi način može biti smatraj sve delom programa, prvo ideš do prve prepreke i paziš na daljinu, završiš taj deo programa, obilaziš prepreku, krećeš ponovo da pratiš liniju i tražiš novu prepreku, imaš jednu petlju pa drugu, pa treću nemoj sve da stavljaš na jedno mesto.
VladoLendvaj
#13
repeat until dosao do prepreke
prati crtu
stani
zaobidji prepreku
repeat until dosao do prepreke
prati crtu
stani
tomislav.novosel
#15
Napišemo program, prati liniju i zaobiđe prepreku. Kad treba opet početi pratiti liniju, iznad koje se nalazi, samo stoji…??
luka432
#18
Oprostite na smetnji kad radimo 4 kolo robot nam se nece zaustaviti ispred 1. prepreke program smo probali napraviti kako ste i poslali ali nam se i dalje neće zaustaviti
VladoLendvaj
#20
Možda se nađe iznad bijelog i stane, probajte promijeniti da ne ide unutar crte nego lijevom stranom