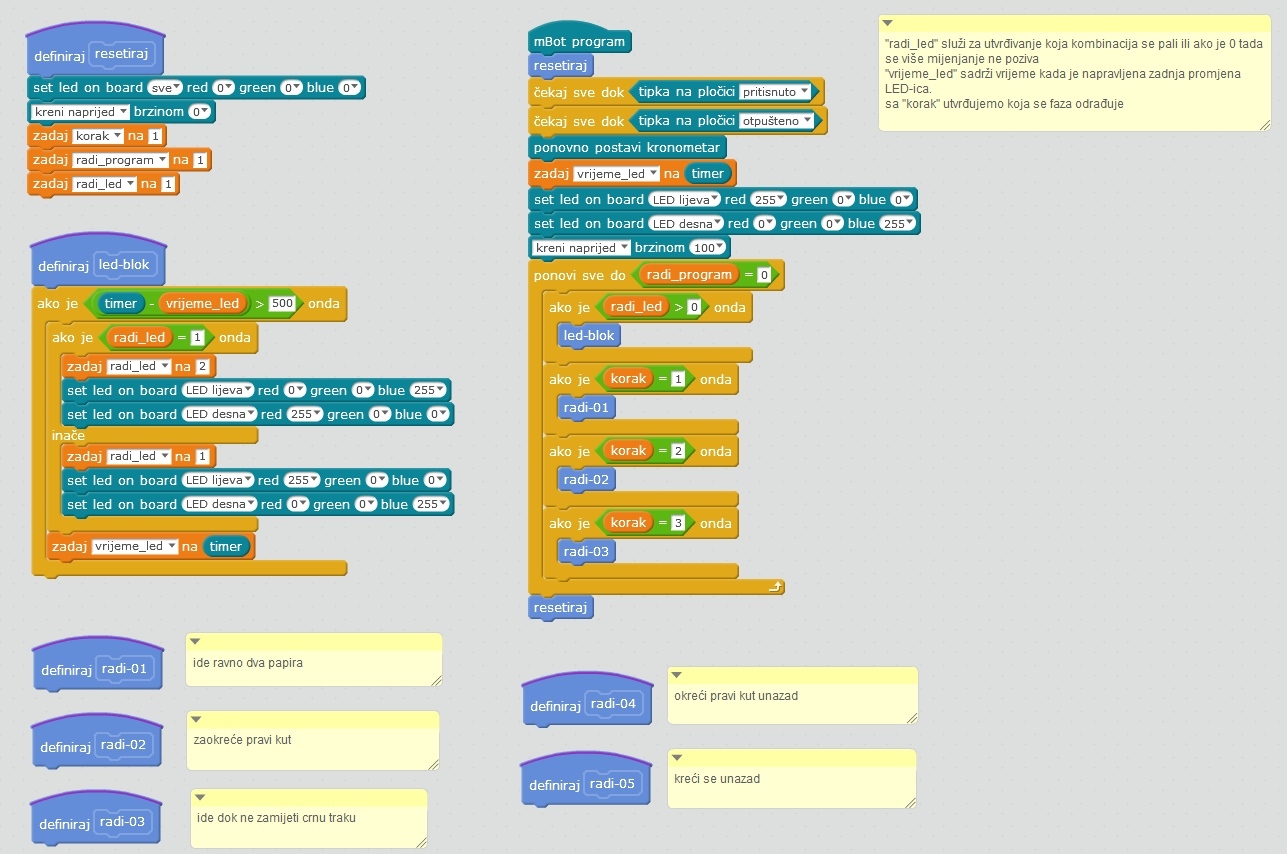
pa ovo je manje vezano za mBot a više za algoritme - logika bi radila sa bilo kojim sustavom jer se ne temelji na specifičnostima sustava.
Zamislite si učionicu. U učionici je učitelj i 6 učenika. Učitelj stoji a učenici su sjeli u dva reda na način da je u lijevom redu samo jedan učenik a u desnom redu je 5 učenika smještenih jedan iza drugoga. Recimo da je lijevi učenik broj 1 a ostali su brojevi od 2 do 6.
Učitelj proziva prvo lijevog pa onda desnog učenika i to samo one u prvom redu. Prozivanje ide naizmjenice prvo lijevi pa desni pa ponovo lijevi itd. Svaki učenik zna raditi samo jednu stvar. kada radi on ustane a kada je gotov, sjedne 
Svi oni gledaju na ekran autić i dvije štoperice. Auto sluša glasovne naredbe. Prva štoperica je za prvog učenika a drugu štopericu gledaju svi ostali učenici.
Prvi se učenik razlikuje od ostalih jer njega stalno prozivaju i on je zadužen za lampice.
Prije svega učitelj stavi auto na pod, kaže mu “kreni naprijed” i resetira obje štoperice pa krene prozivati.
Kada god je prvi učenik prozvan, on pogleda na štopericu i ako je prošlo duže od pola sekunde tada ponovo zamijeni lampice, resetira svoju štopericu i sjedne, u suprotnom samo sjedne.
Sada je red na učenika broj 2. On pogleda da li je prošlo 2 sekunde jer toliko autić treba da bi sa tom brzinom došao do točke skretanja i ako nije onda samo sjedne i čeka da ga netko ponovo prozove a u suprotnom izda naredbu autu “stani” i “započni sa skretanjem”, resetira drugi kronometar, uzme svoju stolicu i ode iz učionice a svi iza njega se presele jedno mjesto naprijed.
Učitelj sada prozove ponovo prvog učenika koji obavi svoje sa lampicama ako treba a nakon toga proziva učenika broj 3 (jer je drugi odradio svoje i otišao). Treći gleda na kronometar i ako je prošlo sekundu (jer toliko treba vremena da se auto okrene za 90 stupnjeva) tada vikne “stani” i “kreni naprijed”, resetira kronometar i ode iz učionice. U suprotnom samo sjedne.
itd.
Lijevi red se ne mijenja i učitelj tog jadnička proziva u svakom krugu a u drugom redu je svaki put sve kraći kada netko od učenika obavi svoj posao.
Kada učenik 6 utvrdi da je auto završio sa putovanjem tada vikne “stoj”, zgrabi učenika broj 1 za ruku i zajedno odu iz učionice. Učitelj na kraju ostaje sam, auto je zaustavljen i priča je time gotova.
Da li je ovako jasnije? 
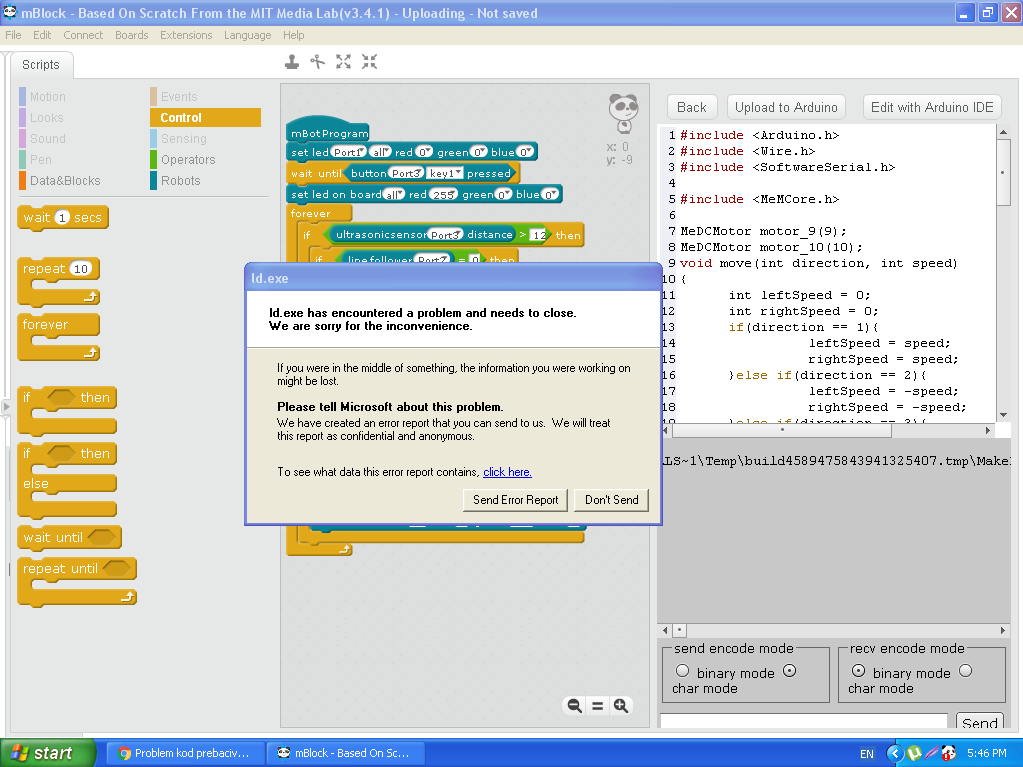
 javi da li radi - jer ovo sam sve iz glave napisao - nemam sada mBota uz sebe da provjerim - no … bude valjda
javi da li radi - jer ovo sam sve iz glave napisao - nemam sada mBota uz sebe da provjerim - no … bude valjda 


 :
: