Pokusajte timer staviti na prvo mjestu u naredbu if-then-else gdje u else ide naredba za pracenje linije.
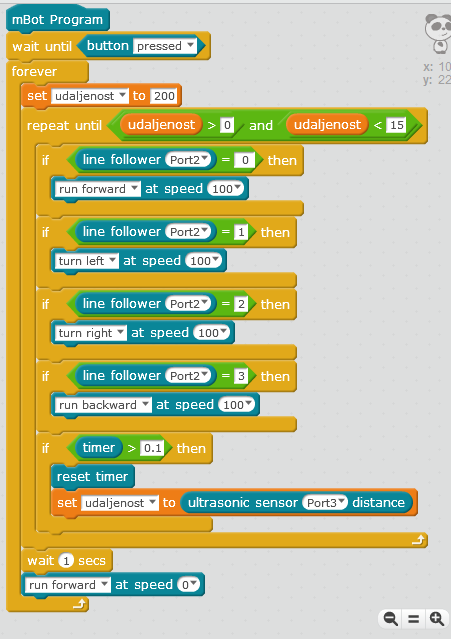
Program za praćenje linije i prepoznavanje prepreke ultraz.senzorima

Boris
#4
Hvala lijepa, ali opet se nakon par sekundi vožnje po liniji zaustavi, iako prepreke nema u blizini. Inače u vožnji kada se kreće ravno, dakle kada ne prati liniju uredno prepoznaje prepreku na zadanih 15 cm i zaustavlja se, što bi značilo da ultraz. senzori dobro rade.
Dejan_PT
#5
Na cemu vam je staza? Nama se taj problem javljao zbog neravne staze i loseg osvjetljenja u prostoriji.
Boris
#6
Staza je ona mala osmica iz kutije mBota a podloga parket. Naime to radim doma kao pripremu za nastavu.
Dejan_PT
#9
Zao mi je, ali trenutno nemam neku konstruktivnu ideju kako rjesiti problem. Mozda probati isprintati neku od staza koje su se koristile na natjecanjima i na njoj isprobati program…
3 kolo - pripreme i provedba
LMazzi
#10
stavite uvjet da testirana udaljenost mora biti veća od 0 - neki od tih senzora zna vraćati 0 u slučajevima kada nema prepreke bliže od maksimalno prihvatljive udaljenosti ili ako dođe do interferencije signala.
Boris
#13
Hvala na savjetu kolega LMazzi. Uz navedeni uvjet sve funkcionira kako treba.
4. kolo tema za pomoć
vidivanjek
#17
Set udaljenost vam je unutar forever petlje, što znači da uvijek prije nego je provjerite udaljenost je ponovno postavljena na 200, što nikada nije <15.
dragon
#18
Kako nadograditi ovaj program tako da se nakon kretanja unazad zaustavi na par sekundi, a onda okrene i prati liniju nazad do starta gje se postavlja kutija, a robot mora da stane prije nego udari u kutiju.
LMazzi
#19
podijeli pa vladaj  prvi dio programa radi vođenje do cilja, nakon toga ide blok koji okreće robota i nakon toga ide treći koji po liniji ponovo ide prema startu a koristi ultrazvučni senzor za detekciju trenutka zaustavljanja
prvi dio programa radi vođenje do cilja, nakon toga ide blok koji okreće robota i nakon toga ide treći koji po liniji ponovo ide prema startu a koristi ultrazvučni senzor za detekciju trenutka zaustavljanja
dragon
#20
Hvala LMazzi, riješen problem. Da li može pomoć za sljedeći kod. Kako da uradim kod da robot ide naprijed po bijeloj površini i da broji crne linije koje stoje po pravim kutom. Kada npr. izbroji 4 da se zaustavi. Pokušavao sam ali ništa.
vidivanjek
#21
Nisam probao na stvarnom robotu, ali evo jedne ideje:
EDIT: /!\ Zaboravio sam na početku staviti čekanje na tipku! Dodajte ili jako pazite na robota ako doslovce prepisujete program.

dragon
#22
Hvala na pomoći, mnogo ste mi pomogli. Evo kako izgleda https://www.youtube.com/watch?v=fuU2bcYhXCk